|
Ph.D. student at The Hong Kong Polytechnic University , advised by Dr David Navarro Alarcon, Robotics and Machine Intelligence lab. I received my B.Sc. in Automotive engineering from South China University of Technology in 2019. My research focuses on Bimanual manipulation, Deformable object manipulation, Robot learning, Motion planning. Email / CV / ResearchGate / |

|
|
|
|
Shengzeng Huo, Anqing Duan, Lijun Han, Luyin Hu, Hesheng Wang and David Navarro-Alarcon preprint, 2023 arxiv To facilitate the efficient learning of robot manipulation skills, in this work, we propose a new approach comprised of three modules: (1) learning of general prior knowledge with random explorations in simulation, including state representations, dynamic models, and the constrained action space of the task; (2) extraction of a state alignment-based reward function from a single demonstration video; (3) real-time optimization of the imitation policy under systematic safety constraints with sampling-based model predictive control |
|
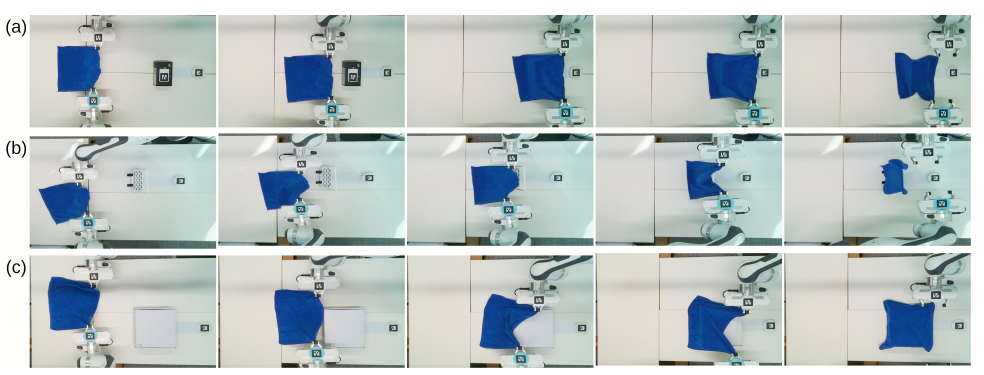
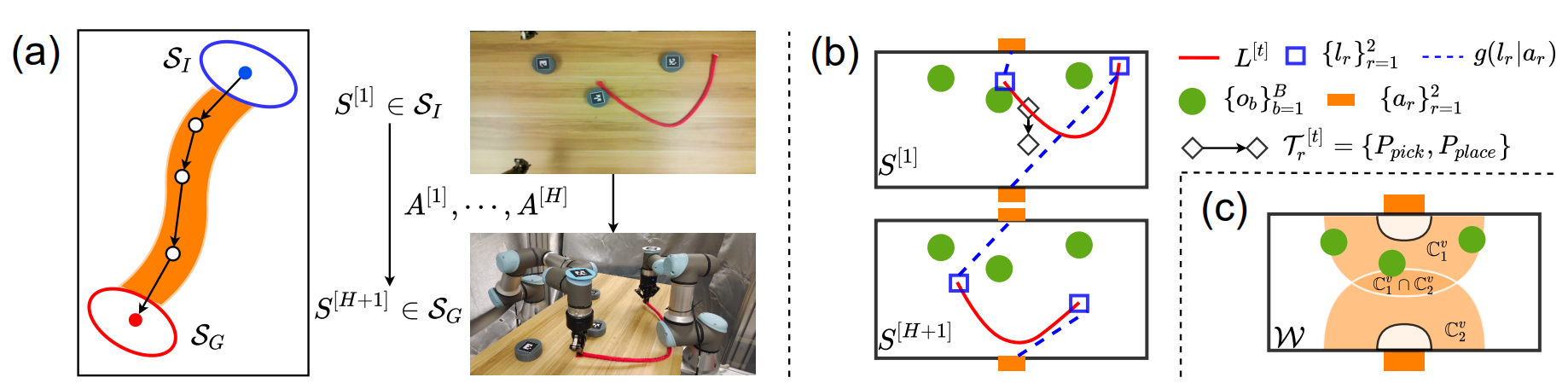
Shengzeng Huo,Fangyuan Wang, Luyin Hu, Peng Zhou, Jihong Zhu, Hesheng Wang and David Navarro-Alarcon Advanced Intelligent System, 2024 arxiv To develop advanced robotic manipulation capabilities in unstructured environments that avoid these assumptions, we propose a novel long-horizon framework that exploits contrastive planning in finding promising collaborative actions. |
|
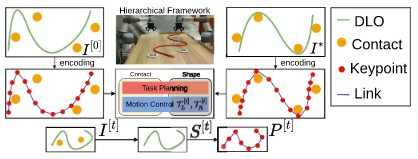
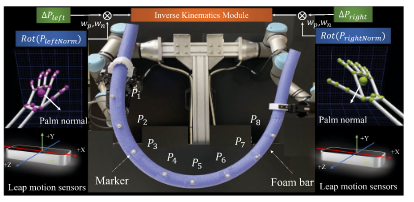
Shengzeng Huo, Anqing Duan, Chengxi Li, Peng Zhou, Wanyu Ma, Hesheng Wang and David Navarro-Alarcon RAL, 2022 IEEE / arxiv This letter addresses the problem of contact-based manipulation of deformable linear objects (DLOs) towards desired shapes with a dual-arm robotic system. |
|
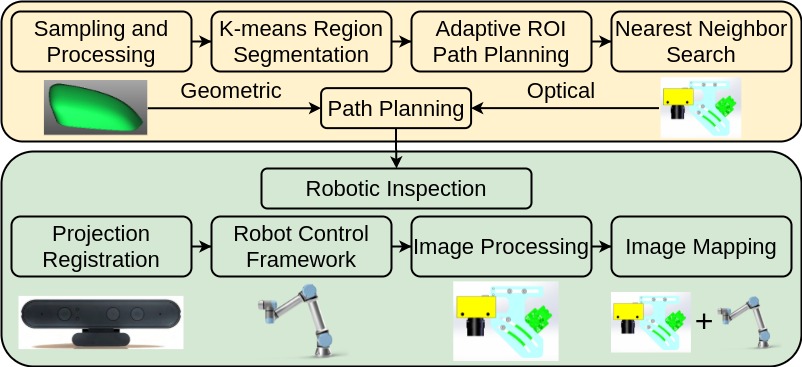
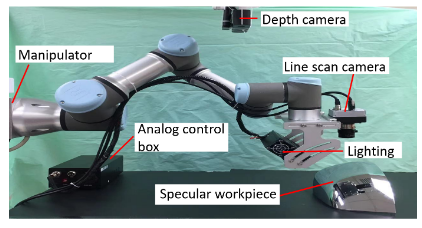
Shengzeng Huo, Bin Zhang, Muhammad Muddassir, David T. W. Chik and David Navarro-Alarcon. IEEE Sensor Journal, 2021 ieee / pdf / We present a novel sensor-based system to perform defect inspection tasks automatically over free-form specular surfaces. |
|
Peng Zhou, Jihong Zhu, Shengzeng Huo*, and David Navarro-Alarcon. RAL, 2021 ieee / pdf We proposed latent framework to enable soft object representation more generic (independent from the object’s geometry and its mechanical properties) and scalable (it can work with 1D/2D/3D tasks). I |
|
Shengzeng Huo, David.T.W. Chik and David Navarro-Alarcon ICRA, 2021 ieee / pdf We present a robotic system to automatically perform defect inspection tasks over free-form specular surfaces, which the image acquisition sub-system is equipped with a 6-DOF robot manipulator to achieve flexible scanning. |
|
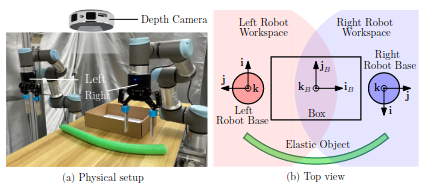
Wanyu Ma, Bin Zhang, Lijun Han, Shengzeng Huo, Hesheng Wang and David Navarro-Alarcon TMech,2022 arxiv / IEEE we propose a new action planning approach to automatically pack long linear elastic objects into common-size boxes with a bimanual robotic system. |
|
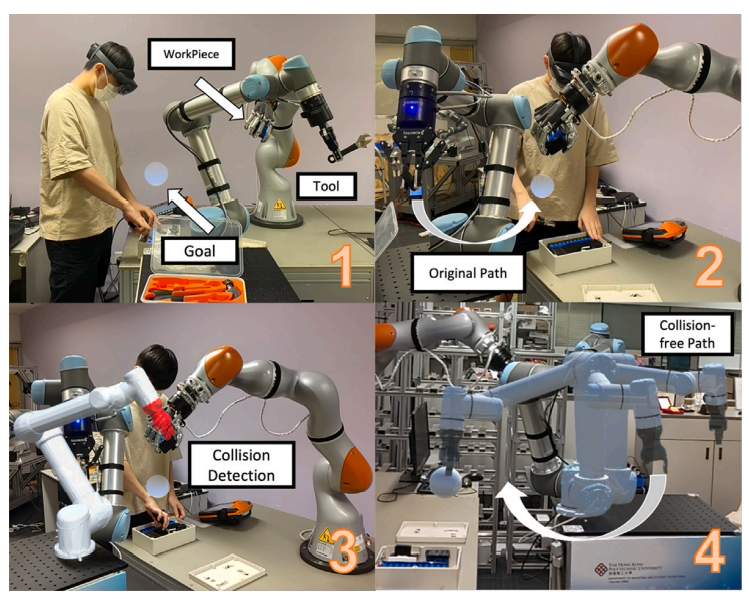
Chengxi Li, Pai Zheng, Yue Yin, Yat Ming Pang, Shengzeng Huo RCIM,2022 ELSEVIER To achieve symbiotic human-robot interaction (HRI), this work proposes a mutual-cognitive safe HRI approach including worker visual augmentation, robot velocity control, Digital Twin-enabled motion preview and collision detection, and Deep Reinforcement Learning-based robot collision avoidance motion planning in the Augmented Reality-assisted manner. |
|
Stolen from Jon Barron |